Difference between revisions of "project01:P2"
(→Arwin Hidding) |
(→Arwin Hidding) |
||
| Line 67: | Line 67: | ||
[[image:Slide 16 Function placement processing.png|800px]] | [[image:Slide 16 Function placement processing.png|800px]] | ||
[[image:Slide 17 result in grasshopper function placement.png|800px]] | [[image:Slide 17 result in grasshopper function placement.png|800px]] | ||
| − | [[image:|800px]] | + | [[image:Slide 18 ground floor.png|800px]] |
| − | [[image:|800px]] | + | [[image:Slide 19 first floor.png|800px]] |
| − | [[image:|800px]] | + | [[image:Slide 21 paths to pavilion scheme.jpg|800px]] |
| − | [[image:|800px]] | + | [[image:Slide 22 simulation path first generation.png|800px]] |
| − | [[image:|800px]] | + | [[image:Slide 22-b simulation path first generation.png|800px]] |
| − | [[image:|800px]] | + | [[image:Slide 23 path the pavilion result.png|800px]] |
| − | [[image:|800px]] | + | [[image:Slide 24 second generation paths.png|800px]] |
| − | [[image:|800px]] | + | [[image:Slide 25 section.png|800px]] |
| − | [[image:|800px]] | + | [[image:Slide 26 site plan.png|800px]] |
| − | [[image:|800px]] | + | [[image:Slide 27 floorplan beg grond.png|800px]] |
| − | [[image:|800px]] | + | [[image:Slide 28 floorplan-2.png|800px]] |
[[image:|800px]] | [[image:|800px]] | ||
[[image:|800px]] | [[image:|800px]] | ||
Revision as of 20:56, 20 January 2016
Contents
Arwin Hidding
Abstract
The goal of the design studio is to formulate a design proposal for a 7000 m2 pavilion for the World Expo in 2025 in Rotterdam. The theme of the world expo is: where ambition turns environmental challenges into economic opportunities. The building industry is a large polluter, since manufacturing processes cause a lot of waste and has a high energy consumption. The paradigm shift from mass standardization to mass customization is made possible by the third industrial revolution, namely the robotization of the manufacturing industry. When the manufacturing processes in the building industry are robotized this could reduce energy consumption, reduce waste, increase efficiency and use less materials while allowing humans to specialize. Robotic devices are already being used in the manufacturing industry, but they are not being used to their full potential. The tasks they are most commonly given are repetitive, because of limitations in the software and willingness/knowledge of manufactures. The pavilion should showcase the development of the robotic devices that will allow for mass customization in the building industry. ROS industrial consortium is a developer of open source robotic software and apply the software to the manufacturing industry. During the World Expo, the ROS industrial consortium will exhibit the newest technologies and showcase the major developments. After the World Expo the pavilion will be used as a research, education and conference centre by ROS.
Research questions - In what way can the pavilion be shaped so the visitor will be stimulated to explore the pavilion and its exhibitions? - In what way can the paths to the pavilion and inside the pavilion be shaped to account for these people flows? - The inhabitants of the Noordereiland in Rotterdam appreciate the park space on the chosen site. In what way can the pavilion be placed to maintain or improve the qualities that are present on the site?
Exploring Networks


























 [[image:|800px]]
[[image:|800px]]
[[image:|800px]]
[[image:|800px]]
[[image:|800px]]
[[image:|800px]]
[[image:|800px]]
[[image:|800px]]
Site Analysis
Function Placement
Parametric functions placement in Processing
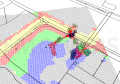
Hub placement + sub functions in processing

Path connecting functions

Main acces path placement principle

Swarm Peopleflow central path
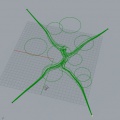
Agents paths recorded in grasshopper
.jpg)
Peopleflow swarm connecting spaces
Peopleflow swarm central space to functions

Result peopleflows: Path central space to functions

Result peopleflows: Path central space to functions

Result peopleflows: Path central space to functions

Make visitor curious

Hub path options

Hub path options







Requirements network intelligence

Progress site model
