Difference between revisions of "project09:P1"
Marco Galli (Talk | contribs) (→ROBOTIC COLONISATION | design to production system) |
Marco Galli (Talk | contribs) (→VISION | what's next?) |
||
| (One intermediate revision by one user not shown) | |||
| Line 206: | Line 206: | ||
== <span style="color:black; background:#FCEE21"> '''VISION''' </span> <span style="color:#FFFFFF"> | </span> what's next?== | == <span style="color:black; background:#FCEE21"> '''VISION''' </span> <span style="color:#FFFFFF"> | </span> what's next?== | ||
| + | |||
| + | [[File:RS P1-22.png|850px]] | ||
[[File:TEST_1.jpg|850px]] | [[File:TEST_1.jpg|850px]] | ||
| + | |||
| + | |||
| + | <div style="width: 850px; margin:-4px; padding: 0px; border: 4px solid #FCEE21;" align="center"> | ||
| + | <span style="font-size: 30px; color: black;"> | ||
| + | |||
| + | 1) how can we re-urbanise / re-cycle / re-organise after a disaster/crisis? | ||
| + | 2) how can we insert robotic fabrication in the architectural environment? | ||
| + | |||
| + | Time based D2RP Colonisation System | ||
| + | - Dynamic architecture | ||
| + | - Animation, motion and transformation | ||
| + | - Plug in - Plug out | ||
| + | - Variation<br> | ||
| + | </span><br> | ||
| + | </div> | ||
| + | <br> | ||
== <span style="color:black; background:#FCEE21"> '''REFERENCES''' </span> <span style="color:#FFFFFF"> | </span> research data and literature== | == <span style="color:black; background:#FCEE21"> '''REFERENCES''' </span> <span style="color:#FFFFFF"> | </span> research data and literature== | ||
Latest revision as of 15:01, 4 November 2015
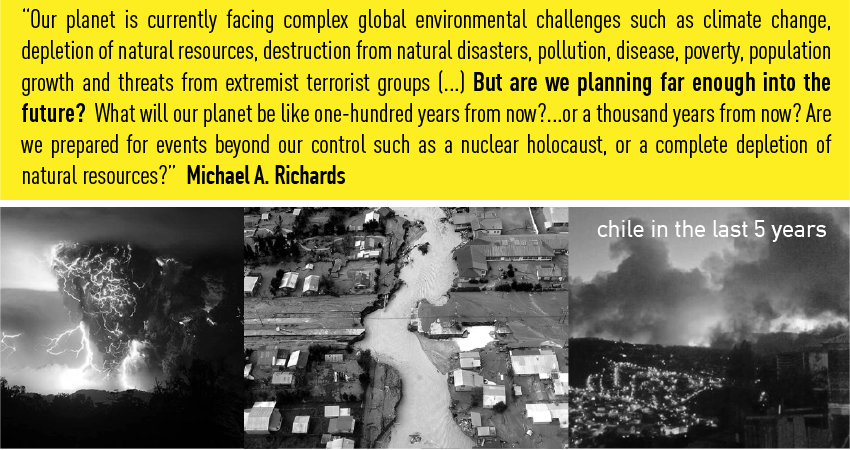
WHAT'S NEXT? | A pavilion for the New World
End of the world?

Architecture back seat
- need of a social turn > protect and society (50s) > project and culture (now) > social advances? THE SOCIAL COMPONENT
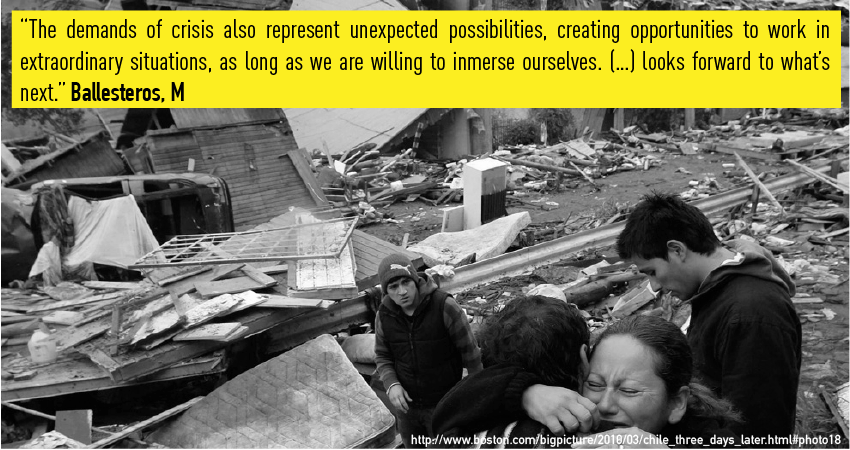
- disaster design protocols? re construction protocols?
- What is the role of the Architect? > embrace future - very soon - problematics
how do we re-urbanise / re-cycle / re-organise after a disaster/crisis?
AGE OF THE MACHINES | Historical References
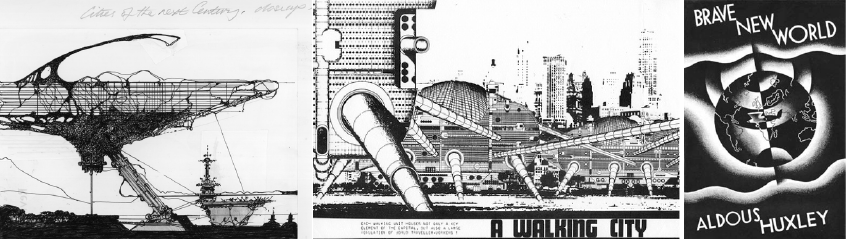
- utopia > anticipation > exploration & foresight
- needs in the system - new system?
ROBOTICS | new technology?
State of art
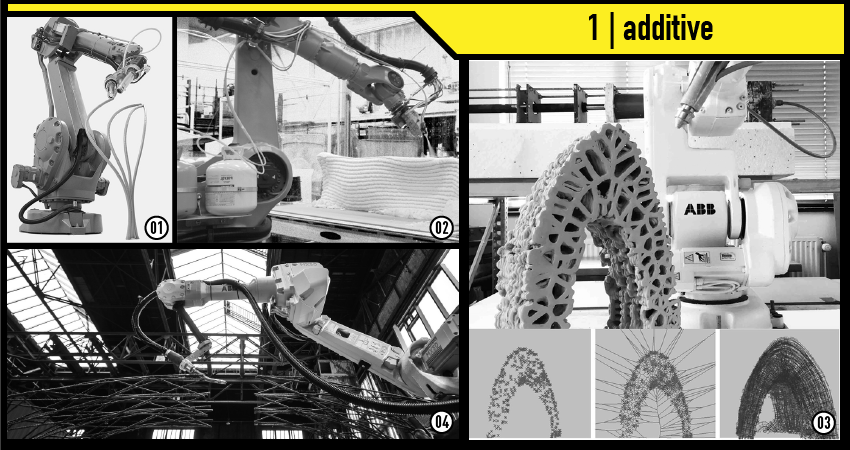
Fig 1
Fig 2
Fig 3
Fig 4
Fig 5
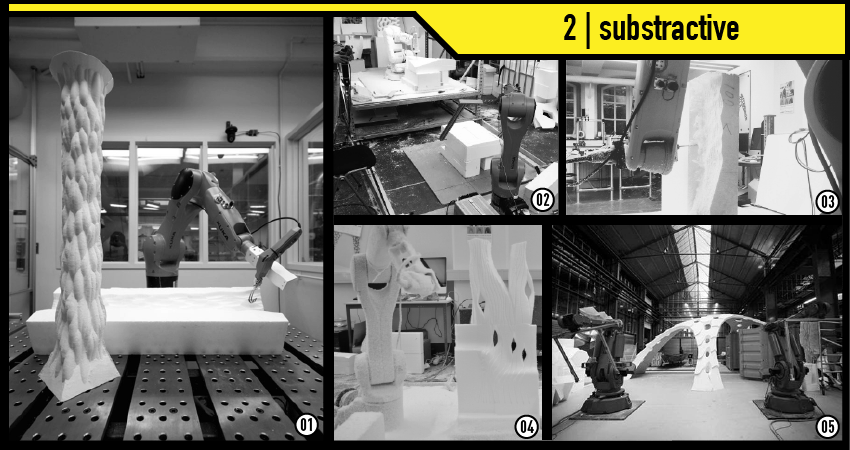
Fig 1
Fig 2
Fig 3
Fig 4
Fig 5
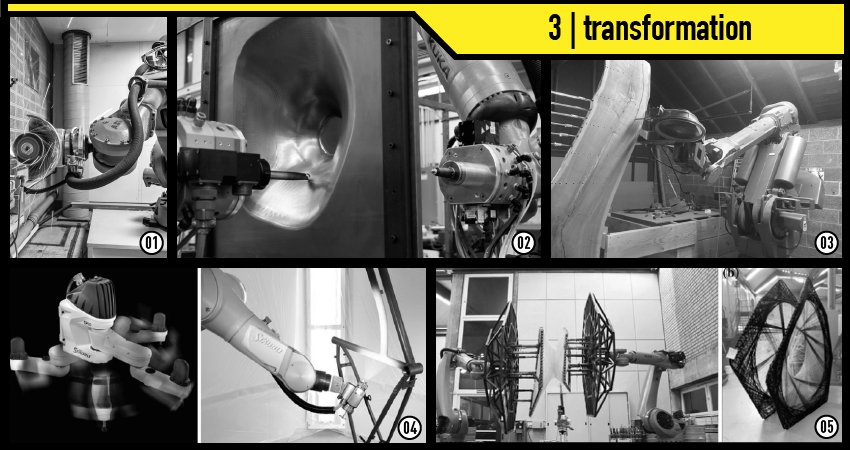
Fig 1
Fig 2
Fig 3
Fig 4
Fig 5
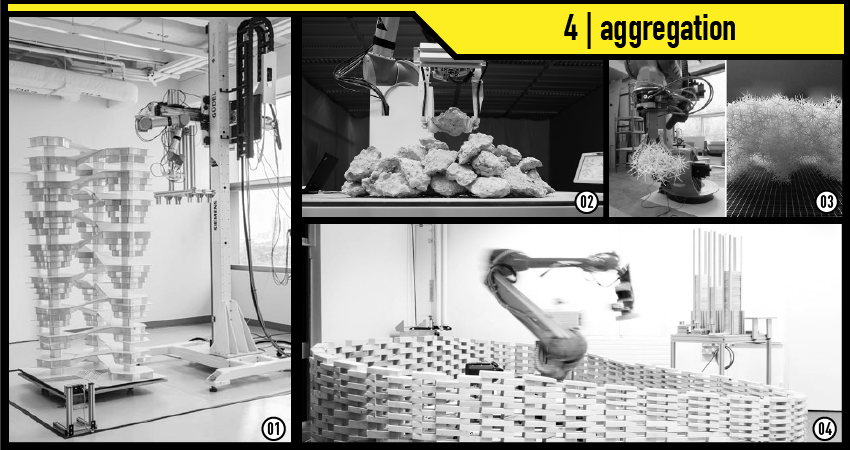
Fig 1
Fig 2
Fig 3
Fig 4
Fig 5
- new tech to help this “new” modernisation
how do we insert robotic fabrication in the architectural building process?
SPACE ROBOTICS | a fully robotic environment
Space robotics is the development of general purpose machines that are capable of surviving (for a time, at least) the rigors of the space environment, and performing exploration, assembly, construction, maintenance, servicing or other tasks that may or may not have been fully understood at the time of the design of the robot.
Humans control space robots from either a “local” control console controlled by astronauts inside the pressurized cabin or “remotely".
Space robots are generally designed to do multiple tasks, including unanticipated tasks, within a broad sphere of competence (e.g. payload deployment, retrieval, or inspection; planetary exploration).

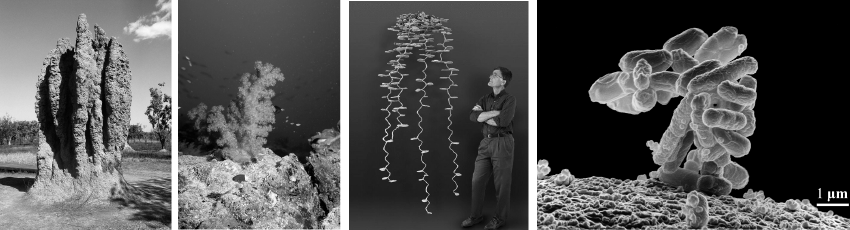
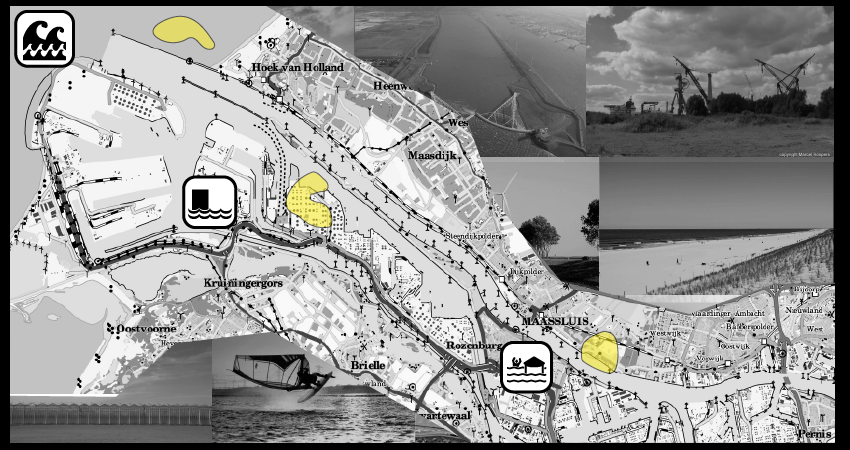
COLONISATION | geo-logic
How? Colonisation in biology
Colonisation is the process in biology by which a species spreads to new areas. Colonisation often refers to successful immigration where a population becomes integrated into a community, having resisted initial local extinction. species must continue to colonize new areas through its life cycle (called a taxon cycle) in order to achieve longevity. - metapopulations.
A colony refers to individual organisms of the same species living closely together, usually for mutual benefit, such as stronger defense or the ability to attack bigger prey. Some insects (ants and honey bees, for example) live only in colonies. A colonial organism is an organism composed of multiple constituent organisms. The organisms can be unicellular or multicellular. closer association of its component parts into discrete individual superorganisms, and typically by the presence of differentiation into two or more specialized component types.
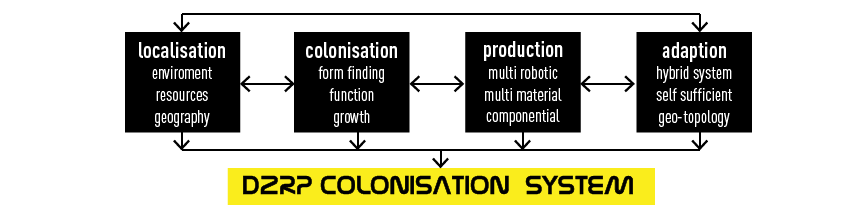
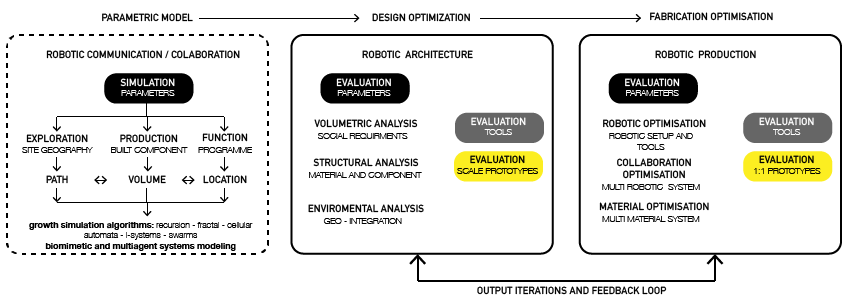
ROBOTIC COLONISATION | design to production system
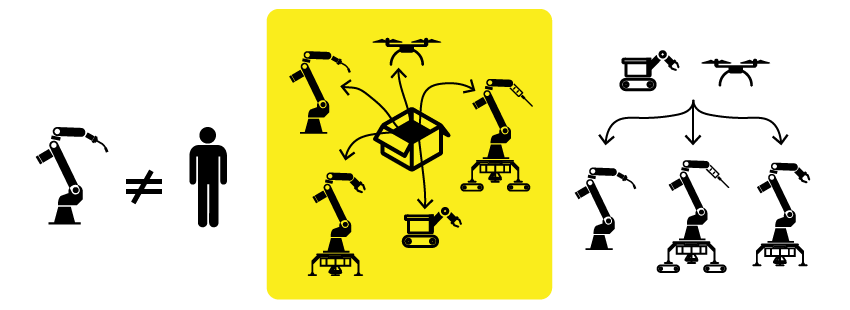

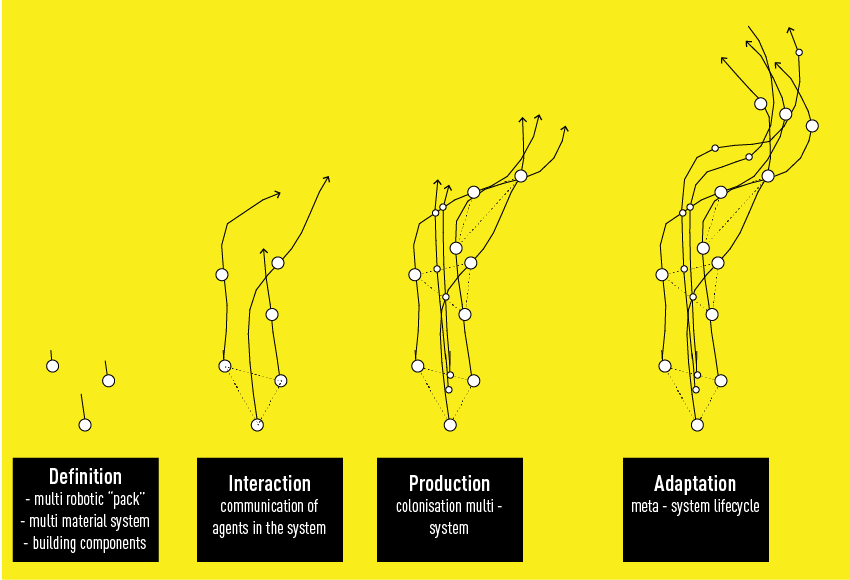
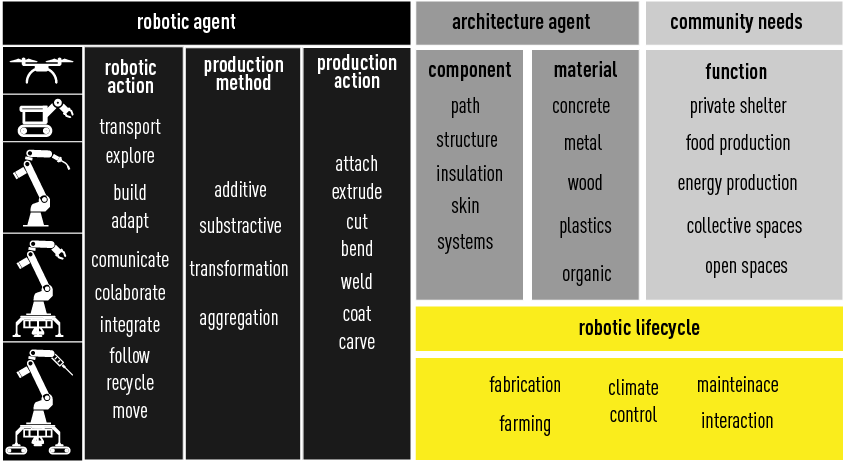
PARAMETRIC FRAMEWORK | micro to macro
http://ex25.hyperbody.nl/index.php/Shared:Group_1
VISION | what's next?
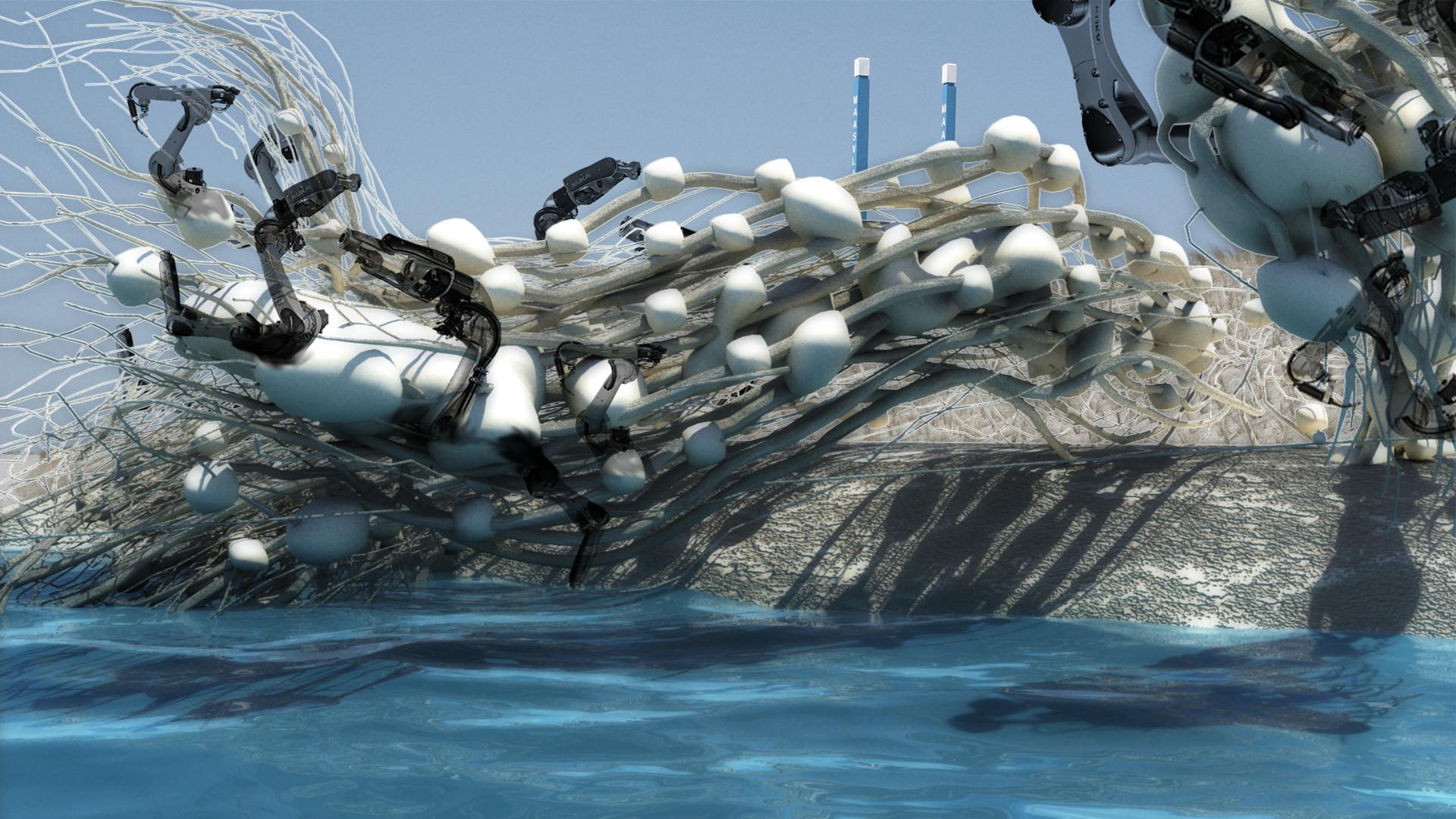
1) how can we re-urbanise / re-cycle / re-organise after a disaster/crisis? 2) how can we insert robotic fabrication in the architectural environment?
Time based D2RP Colonisation System
- Dynamic architecture
- Animation, motion and transformation
- Plug in - Plug out
- Variation
== REFERENCES | research data and literature==