Msc1G2:Student3
Structure
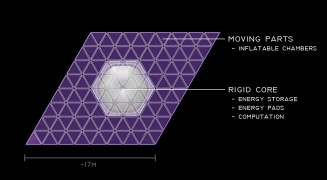
The small module works in a sense like a boat. The hull is designed to enable the module to go through the water quickly and the sides are designed for connecting to other modules. A big module is built up out of a core and around that several triangles. The triangulated sides are able to bend up, the core isn’t. The core is the heart of the module, it regulates the bending by receiving and sending data to the triangles, it has a motor to enable the module to move from one place to another and is able to communicate with other modules. The basic income of data and as well an energy source are the pressure sensors distributed throughout the module, this data is used to drive the pumps that inflate the air chambers.
The submersion of the module is calculated in two states. Dead weight and full load. In the state of dead weight the module has an estimated gravity and buoyancy (the uplift from the water pressure) force of 220kN, this means that the module is submerged for 55%. In the case of full load, defined by 86 people resulting in 320kN of gravity and buoyancy, the module will submerge a bit more, but maximum up to 90%. The stability is calculated by the GM value of the module in two states. The first state is flat in the water, both dead weight and full load and the second state is bended up, also dead weight and full load. The GM is the distance between the point of strength of the gravity and a notional point M above the module. The distance is defined by the position of the keel, the moment of inertia Ixx, the position of the gravity and buoyancy force and the maximum horizontal distance between the gravity and buoyancy force points. The GM should be a positive value otherwise a module will overturn. The estimated values for the GM are from 0,68m (full load, bended sides) to 1,96m (no load, flat surface). Up to this point only symmetrical stages are described. If a module bends asymmetrical the an extra force (F) is needed to keep the module stable, this is reached by attaching another module to the non-bended side. When developing the concept further the geometry can be optimized for higher GM value.
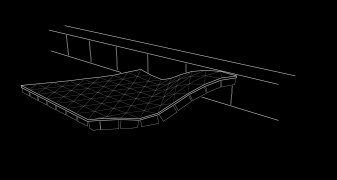
The bottom structure is built up from plastic covered with silicone air chambers; pumps and a central air chamber are in the middle. The bottom side of the triangle exists out of three double curved plastic plates, with silicone casted on it. This way it is possible to construct, deconstruct or do maintenance on the platforms and the structure want get too heavy. The plastic parts have an oval shaped pattern of holes, this way the silicone is on both sides of the structure and stays in place. The airflow is regulated by a semi-closed system, air is redistributed from central air chambers to the inflatable sides and back, only if the system loses air pressure overtime there should be a central compressor to pump it up again. To assemble a piece of the structure first the top surface of silicone should be molded with the plastic top parts, lighting and pressure sensors embedded. Next the triangle sides can be attached to the plastic parts sticking out of the surface.
The connection part, which is on the outer triangles of a module is basically a hook and wire system. If a module detects another module the hooks open and wait for detecting the wire. When the wire is in the right position the hook grasps the wire and both the wire and the hook retract. The modules are now fixed to each other. The connection to the river banks will work in a similar way, with wires on the quay and the module hooking into it.
Bending behaviour of two triangles.
Connecting a small and big module.
Connection reference: Tactically Expandable Maritime Platform TEMP UPenn GRASP ModLab
Documentation
Sketch of how a module connects to the quay
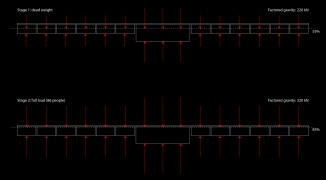
Sketch of the forces working on the platform

Previous version of module

Previous small + big module
Previous plan of a module

Constellation model
Constellation model






